简单的神经网络在控制机器人假肢方面优于更复杂的系统
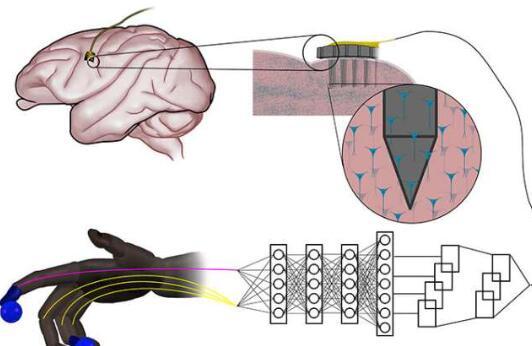
密歇根大学的研究人员已经表明,受人体自然神经回路启发的人工神经网络使灵长类动物能够更快、更准确地控制大脑控制的假手和手指。这一发现可能会为那些处理肢体丧失或瘫痪的人带来对先进假肢的更自然的控制。
工程师和医生团队发现,与不使用神经网络的传统算法相比,前馈神经网络在控制机器人手指期间将峰值手指速度提高了 45%。这推翻了一个假设,即需要更复杂的神经网络,如机器学习其他领域使用的神经网络,才能实现这种水平的性能改进。
“这种前馈网络代表了一种更古老,更简单的架构 - 信息仅沿一个方向移动,从输入到输出,”密歇根大学生物医学工程副教授,该论文的通讯作者Cindy Chestek博士说。 自然通讯.
“所以,看到它的表现如何超越我们,对我们来说是一个惊喜。 复杂系统.我们认为,前馈系统的简单性使用户能够获得更直接和直观的控制,这可能更接近于如何 人体 自然运作。
精细运动技能对人类非常重要,这种功能的丧失对瘫痪者可能是毁灭性的,第一作者Matthew Willsey博士说,他是密歇根大学健康学院密歇根医学院的功能神经外科研究员。
“我们非常有动力使用机器学习的最新技术来解释 神经活动 从大脑控制灵巧的手指运动,“威尔西说。“我们希望这项工作可以帮助那些失去它的人恢复精细运动功能。
先进的假肢和 脑机接口 承诺将人手启用的精确控制归还给那些可能由脊髓损伤、中风或其他伤害和疾病引起的瘫痪患者。但重建自然的沟通流 人类的思想 而机器人假肢——速度和精度——仍然是一个绊脚石。
例如,在脊髓损伤中,人造神经网络可以通过使用电极捕获来自大脑的脉冲,用人工智能解释它们并用它来控制,从而重建大脑和脊髓之间的切断连接。 假手 或使原生肢体复活。
但在计算中,前馈神经网络模型被认为对于许多使用递归的高级应用程序来说功能不那么强大。 神经网络.循环网络中的节点不是通过单向处理传递输入,而是具有自己的动态 - 通过反馈创建自己的内部循环的能力,使它们能够记忆和重放序列。当您从先前记录的神经数据中预测运动时,这非常有效,让一些专家假设这在新实验中保持不变。
切斯特克说,实际上,用于直接电机控制的循环网络的复杂性似乎“与用户对抗”。
“在人体的运动皮层和手部运动之间只有几个神经元和几个突触,”她说。“那里不需要大量的处理,前馈神经网络可能更接近自然系统。
该团队希望他们的发现将有助于推动未来的研究,以提高先进假肢对大脑冲动做出反应的速度和准确性。
“在开发这种算法时,我们试图坚持爱因斯坦著名的设计原则,即'一切都应该尽可能简单,但不要更简单',”Willsey说。
“我们的算法需要有足够的复杂性来理解大脑电信号与用户预期的手指运动之间可能存在的非线性关系。然而,该算法有一天可能会成为完全可植入的脑机接口系统的一部分,该系统可以恢复瘫痪者的运动,不必要的复杂性可能会以不希望的方式给这些未来的系统带来压力,例如缩短电池寿命。
“在密歇根大学,我们很幸运拥有一大批工程师,神经科学家和运动专家,他们在合作文化中合作,推动恢复性神经工程领域向前发展,”该研究的资深作者,密歇根大学医学院神经外科副教授Parag Patil博士说。“这项工作令人兴奋的部分原因是,这些算法几乎可以立即转化为床边,以造福人类研究患者。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
【首都师范大学是211吗】一、“首都师范大学是211吗”是许多考生和家长在选择大学时经常提出的问题。实际上,...浏览全文>>
-
【首都师范大学科德学院自考和统招毕业证不一样吗有什么不一样的】在选择继续教育方式时,很多学生都会关注“...浏览全文>>
-
【首都师范大学科德学院自考本科国家承认学历吗】一、“首都师范大学科德学院自考本科国家承认学历吗”是许多...浏览全文>>
-
【首都师范大学科德学院怎么样首都师范大学科德学院介绍】首都师范大学科德学院是一所位于北京市的全日制本科...浏览全文>>
-
【第一次电影剧情】《第一次》是一部由美国导演理查德·林克莱特(Richard Linklater)执导的电影,于2004年...浏览全文>>
-
【首都师范大学科德学院学费一年多少钱】首都师范大学科德学院是一所经教育部批准设立的全日制本科独立学院,...浏览全文>>
-
【第一次点外卖的流程】对于第一次尝试点外卖的人来说,整个过程可能会有些陌生。不过,只要按照步骤来,就能...浏览全文>>
-
【首都师范大学科德学院学费为什么要这么贵】首都师范大学科德学院作为一所独立学院,近年来在学费方面引发了...浏览全文>>
-
【第一次登泰山的忌讳】泰山,作为五岳之首,不仅是中国文化的重要象征,也是无数人心中的朝圣之地。对于第一...浏览全文>>
-
【首都师范大学科德学院位于哪个城市】首都师范大学科德学院是一所独立学院,隶属于首都师范大学。对于许多学...浏览全文>>