基于折纸结构和磁性致动器的蠕虫式机器人
仿生机器人,模拟特定生物系统的外观,运动和/或功能的机器人系统,可以帮助更有效,更可靠地解决现实世界的问题。在过去的二十年里,机器人专家引入了越来越多的机器人,其中一些从果蝇、蠕虫和其他小生物体中汲取灵感。
中国石油大学(华东)的研究人员最近开发了一种以蠕虫为灵感的机器人,其身体结构基于东方折纸艺术。这个机器人系统在Bioinspiration&Biomimetics中介绍,基于响应磁力的致动器,压缩和弯曲其身体以复制蠕虫的运动。
“软机器人是一个很有前途的领域,我们的研究小组一直在关注,”开发机器人的研究人员之一刘健林告诉Tech Xplore。“在回顾该领域现有的研究文献时,我们发现仿生机器人,如蠕虫启发的机器人,是一个值得探索的话题。因此,我们着手根据现有文献制造一种类似蠕虫的折纸机器人。在设计和审查了几种不同的结构后,我们选择专注于机器人的特定编织图案。
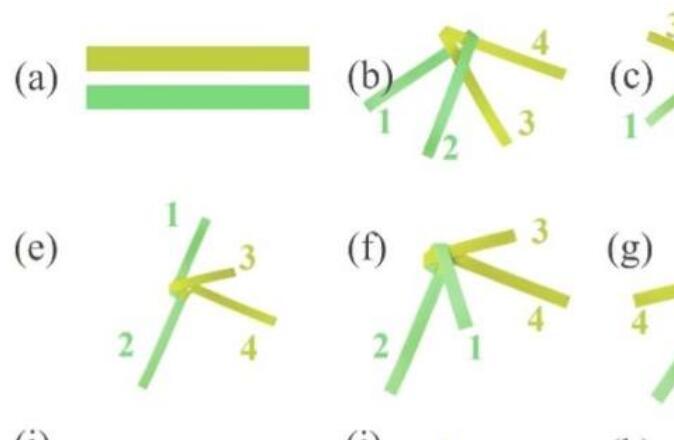
由刘和他的同事创造的蠕虫启发的机器人由一个基于折纸的骨干,体内的24个磁性片和身体外部的两个钕铁硼磁铁组成。机器人的骨干是按照纸编织折纸图案创建的。
当暴露在磁力下时,机器人的身体会变形和压缩,导致运动模式类似于蚯蚓和其他爬行的蠕虫状生物。由于它主要基于纸张和磁铁,因此该系统成本低,易于制造且重量非常轻。
“本文提出的折纸结构再现了蠕虫和其他类似蠕虫的生物的外观和结构,”刘解释说。“近年来推出的几种机器人基于磁致动,这些机器人对于不同的应用很有价值,例如清洁管道和其他受限环境。我们的工作可以极大地丰富折纸机器人领域,并激发新的先进设备的发展。
在最初的模拟中,研究人员使用他们的机器人产生三种不同类型的运动,他们称之为尺蠖,欧米茄和混合运动。这些不同的运动方式可以让更高级的机器人有效地处理不同类型的任务,例如避开障碍物、攀爬墙壁、在管道内爬行或运送小包裹。
未来,刘和他的同事们计划进一步改进他们的机器人设计,并创造更先进的仿生机器人系统。此外,他们希望他们的工作能够激励其他研究团队创造类似的蠕虫启发机器人,以帮助更有效地解决广泛的现实世界问题。
“基于仿生蠕虫的折纸机器人的开发是一个很有前途的研究课题,我计划在未来的工作中进一步探索它,”刘补充说。“例如,我想设计更多的折纸原型机器人,其功能特别受到蚯蚓或其他蠕虫的启发,这对于特定应用可能是有价值的。最后,关注其他驱动方法也可能丰富我们的研究。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
【首都师范大学是211吗】一、“首都师范大学是211吗”是许多考生和家长在选择大学时经常提出的问题。实际上,...浏览全文>>
-
【首都师范大学科德学院自考和统招毕业证不一样吗有什么不一样的】在选择继续教育方式时,很多学生都会关注“...浏览全文>>
-
【首都师范大学科德学院自考本科国家承认学历吗】一、“首都师范大学科德学院自考本科国家承认学历吗”是许多...浏览全文>>
-
【首都师范大学科德学院怎么样首都师范大学科德学院介绍】首都师范大学科德学院是一所位于北京市的全日制本科...浏览全文>>
-
【第一次电影剧情】《第一次》是一部由美国导演理查德·林克莱特(Richard Linklater)执导的电影,于2004年...浏览全文>>
-
【首都师范大学科德学院学费一年多少钱】首都师范大学科德学院是一所经教育部批准设立的全日制本科独立学院,...浏览全文>>
-
【第一次点外卖的流程】对于第一次尝试点外卖的人来说,整个过程可能会有些陌生。不过,只要按照步骤来,就能...浏览全文>>
-
【首都师范大学科德学院学费为什么要这么贵】首都师范大学科德学院作为一所独立学院,近年来在学费方面引发了...浏览全文>>
-
【第一次登泰山的忌讳】泰山,作为五岳之首,不仅是中国文化的重要象征,也是无数人心中的朝圣之地。对于第一...浏览全文>>
-
【首都师范大学科德学院位于哪个城市】首都师范大学科德学院是一所独立学院,隶属于首都师范大学。对于许多学...浏览全文>>