一个允许四足机器人在白天和夜间条件下跟随领导者的框架
与轮式和基于轨道的机器人相比,腿式机器人具有显着的优势,尤其是在不同类型的地形上移动时。这使得它们特别有利于涉及运输货物或从一个地方到另一个地方旅行的任务。
一种有前途的方法可以让有腿的机器人有效地处理这些任务,特别是那些涉及长途旅行的任务,需要教它们跟随“领导者”,无论是特定的车辆还是人类代理人。然而,这可能很难实现,特别是在所有照明和大气条件下。
中国山东大学的研究人员最近开发了一种新的框架,可以为四足机器人提供在夜间和白天条件下跟随领导者的能力。该框架在MDPI的仿生学期刊上介绍,基于视觉和LiDAR检测技术。
“领导者跟随可以帮助四足机器人完成长途运输任务,”张佳林,郭佳敏,柴辉,张勤,李一斌,王志英和张启帆在他们的论文中写道。“然而,长期跟随者必须面对昼夜的变化以及干扰的存在。为了解决这个问题,我们提出了一种四足机器人的昼/夜领先跟踪方法,以实现复杂环境中的鲁棒性和容错人员跟踪。
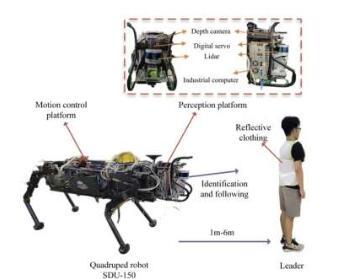
为了有效,领导者跟随框架应该允许机器人在不同的照明条件下准确检测和识别特定的人,以便他们可以跟随他们到所需的位置。Zhang,Guo及其同事提出的方法使用三个不同的模块来实现这一点:人员检测,通信和运动控制模块。
“我们构建了一个自适应联邦滤波器算法框架,它融合了视觉领导者跟随方法和基于反射强度的LiDAR检测算法,”张和他的同事在他们的论文中写道。“此外,该框架使用卡尔曼滤波器,并根据光照条件自适应调整信息共享因子。特别是该框架使用故障检测和多传感器信息来稳定地实现昼夜领先者跟踪。
研究人员引入的领导者跟随框架的一个独特之处在于它使用了故障检测和隔离算法,该算法旨在显着提高其在白天和夜间条件下的性能。该算法依赖于几个不同传感器收集的数据以及检测算法运行的计算,这使其能够适应高频振动、不同级别的照明以及周围环境中反射材料引起的可能视觉干扰。
Zhang,Guo和他们的同事使用山东大学开发的四足机器人SDU-150在一系列试验中评估了他们提出的框架。这些测试产生了非常有希望的结果,因为机器人能够在各种场景中可靠有效地识别领导者。该机器人在室内和室外环境中进行了测试,白天和晚上以及不同的照明条件下。
未来,该研究团队开发的领导者跟随框架可以帮助提高其他现有和新开发的机器人的领导者跟随能力。此外,它可能会激发开发类似的方法,旨在增强机器人在不同照明条件下检测和跟踪特定目标的能力。
“下一步将传感器融合与深度学习相结合,进行数据级多传感器融合,大大提高检测精度并适应高精度操作情况,”研究人员在他们的论文中总结道。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
【首都师范大学是211吗】一、“首都师范大学是211吗”是许多考生和家长在选择大学时经常提出的问题。实际上,...浏览全文>>
-
【首都师范大学科德学院自考和统招毕业证不一样吗有什么不一样的】在选择继续教育方式时,很多学生都会关注“...浏览全文>>
-
【首都师范大学科德学院自考本科国家承认学历吗】一、“首都师范大学科德学院自考本科国家承认学历吗”是许多...浏览全文>>
-
【首都师范大学科德学院怎么样首都师范大学科德学院介绍】首都师范大学科德学院是一所位于北京市的全日制本科...浏览全文>>
-
【第一次电影剧情】《第一次》是一部由美国导演理查德·林克莱特(Richard Linklater)执导的电影,于2004年...浏览全文>>
-
【首都师范大学科德学院学费一年多少钱】首都师范大学科德学院是一所经教育部批准设立的全日制本科独立学院,...浏览全文>>
-
【第一次点外卖的流程】对于第一次尝试点外卖的人来说,整个过程可能会有些陌生。不过,只要按照步骤来,就能...浏览全文>>
-
【首都师范大学科德学院学费为什么要这么贵】首都师范大学科德学院作为一所独立学院,近年来在学费方面引发了...浏览全文>>
-
【第一次登泰山的忌讳】泰山,作为五岳之首,不仅是中国文化的重要象征,也是无数人心中的朝圣之地。对于第一...浏览全文>>
-
【首都师范大学科德学院位于哪个城市】首都师范大学科德学院是一所独立学院,隶属于首都师范大学。对于许多学...浏览全文>>