首页 >> 百科生活 > 生财有道 >
新的人工智能系统允许机器人轻松操纵数千个物体
人类长期以来一直是灵巧的大师。然而,机器人仍在迎头赶上。为了让机器复制人类的能力,麻省理工学院计算机科学与人工智能实验室 (CSAIL) 的一组科学家开发了一种新的人工智能系统,可以赋予机器人同样的灵活性。
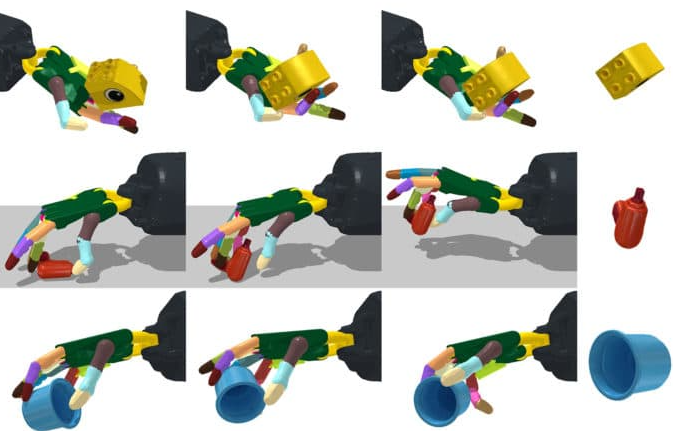
新的无模型框架可以学习用机械手向上和向下重新定向物体,朝着更像人类的操纵迈出一步。在这两种情况下,它都可以操纵 2000 多个几何不同的对象。这种操纵任何东西的新能力可以帮助手以特定的方式和位置快速拾取和放置物体,甚至可以泛化到看不见的物体。
麻省理工学院 CSAIL 团队使用了一个具有 24 个自由度的模拟拟人手,并展示了该系统可以在未来转移到真实机器人系统的证据。
该系统使用具有深度学习的无模型强化学习算法和所谓的“师生”训练方法。“教师”网络接受了有关物体和机器人的信息的训练,这些信息在模拟中很容易获得,但在现实世界中却无法获得。然后将“老师”的知识提炼成可以在现实世界中获取的观察结果,例如摄像机捕获的深度图像、物体姿势和机器人的关节位置。
机器人可以重新定向大量它以前从未见过且不知道形状的物体。它可以操纵苹果、网球、弹珠等圆形小物体,成功率接近100%。然而,当涉及到更复杂的物体时,比如勺子、螺丝刀或剪刀,它的成功率会接近 30%。由于成功率因对象形状而异,因此该团队在未来指出,基于对象形状训练模型可以提高性能。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
分享:
最新文章
-
【首都师范大学是211吗】一、“首都师范大学是211吗”是许多考生和家长在选择大学时经常提出的问题。实际上,...浏览全文>>
-
【首都师范大学科德学院自考和统招毕业证不一样吗有什么不一样的】在选择继续教育方式时,很多学生都会关注“...浏览全文>>
-
【首都师范大学科德学院自考本科国家承认学历吗】一、“首都师范大学科德学院自考本科国家承认学历吗”是许多...浏览全文>>
-
【首都师范大学科德学院怎么样首都师范大学科德学院介绍】首都师范大学科德学院是一所位于北京市的全日制本科...浏览全文>>
-
【第一次电影剧情】《第一次》是一部由美国导演理查德·林克莱特(Richard Linklater)执导的电影,于2004年...浏览全文>>
-
【首都师范大学科德学院学费一年多少钱】首都师范大学科德学院是一所经教育部批准设立的全日制本科独立学院,...浏览全文>>
-
【第一次点外卖的流程】对于第一次尝试点外卖的人来说,整个过程可能会有些陌生。不过,只要按照步骤来,就能...浏览全文>>
-
【首都师范大学科德学院学费为什么要这么贵】首都师范大学科德学院作为一所独立学院,近年来在学费方面引发了...浏览全文>>
-
【第一次登泰山的忌讳】泰山,作为五岳之首,不仅是中国文化的重要象征,也是无数人心中的朝圣之地。对于第一...浏览全文>>
-
【首都师范大学科德学院位于哪个城市】首都师范大学科德学院是一所独立学院,隶属于首都师范大学。对于许多学...浏览全文>>
大家爱看
频道推荐